TOC
- 什么是 / 为什么是 “强化学习”?
- 线性二次调节器(LQR)
- 了解世界
- ==DAgger==
- 独当一面
- Markov 决策过程
- ==策略梯度==
什么是 / 为什么是 “强化学习”?
What? And why?
\[\text{maximize } r\]
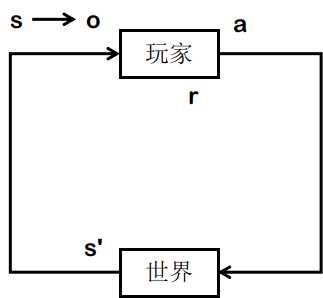
问题解释:假设你在玩 地球OL,如何成为人生赢家?
- 我们受现实制约:\(s \in \mathbb{S}\)
- 而且时常我们无法得知事情的真相:\(o \subset s \text{ or } o \sim s\)
- 我们能做的事情有限:\(a \in \mathbb{A}\)
- 我们心里对自己有数:\(s, a, s' \Rightarrow_{\tau, b} r\)
- 我们能与环境互动! \(s, a \Rightarrow_{\pi, p} s'\)
- 类似于人类的学习机制
- “如果好吃你就多吃点”:\(\text{if } r^\star \uparrow, \text{ then } \uparrow p(s\vert_{r \approx r^\star})\)
- 一种可能的达成 AGI 的途径
线性二次调节器
Linear Quadratic Regulator
- 最优设计算法
- 控制论
- 世界模型:\(\mathbf{x}_{t+1} = f(\mathbf{x}_t, \mathbf{u}_t) = \mathbf{F}_t \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix} + \mathbf{f}_t\)
允许包含高阶项 \(\dot{x}, \ddot{x}, \cdots\)
- 评判标准:\(c(\mathbf{x}_t, \mathbf{u}_t) = \frac{1}{2} \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix}^T \mathbf{C}_t \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix} + \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix}^T \mathbf{c}_t\)
- 目标:\(\min_\tau \sum c\)
- 注意对 \(\mathbf{x}\) 递归带入 \(f\)
\[\begin{align} &\text{/* 1. Backward recursion */} \\ &\text{for } t = T \text{ to } 1 \text{:} \\ &\hspace{1em} \mathbf{Q}_t = \mathbf{C}_t + \mathbf{F}_t^T \mathbf{V}_{t+1} \mathbf{F}_t \\ &\hspace{1em} \mathbf{q}_t = \mathbf{c}_t + \mathbf{F}_t^T \mathbf{V}_{t+1} \mathbf{f}_t + \mathbf{F}_t^T \mathbf{v}_{t+1} \\ &\hspace{1em} Q(\mathbf{x}_t, \mathbf{u}_t) = \mathrm{const} + \frac{1}{2} \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix}^T \mathbf{Q}_t \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix} + \begin{bmatrix} \mathbf{x}_t \\ \mathbf{u}_t \end{bmatrix}^T \mathbf{q}_t \hspace{2em} \text{(total cost from now until end if take } \mathbf{u}_t \text{ from state } \mathbf{x}_t \text{)} \\ &\hspace{1em} \mathbf{u}_t \leftarrow \arg \min_{\mathbf{u}_t} Q(\mathbf{x}_t, \mathbf{u}_t) = \mathbf{K}_t \mathbf{x}_t + \mathbf{k}_t \\ &\hspace{1em} \mathbf{K}_t = -\mathbf{Q}_{\mathbf{u}_t, \mathbf{u}_t}^{-1} \mathbf{Q}_{\mathbf{u}_t, \mathbf{x}_t} \\ &\hspace{1em} \mathbf{k}_t = -\mathbf{Q}_{\mathbf{u}_t, \mathbf{u}_t}^{-1} \mathbf{q}_{\mathbf{u}_t} \\ &\hspace{1em} \mathbf{V}_t = \mathbf{Q}_{\mathbf{x}_t, \mathbf{x}_t} + \mathbf{Q}_{\mathbf{x}_t, \mathbf{u}_t} \mathbf{K}_t + \mathbf{K}_t^T \mathbf{Q}_{\mathbf{u}_t, \mathbf{x}_t} + \mathbf{K}_t^T \mathbf{Q}_{\mathbf{u}_t, \mathbf{u}_t} \mathbf{K}_t \\ &\hspace{1em} \mathbf{v}_t = \mathbf{q}_{\mathbf{x}_t} + \mathbf{Q}_{\mathbf{x}_t, \mathbf{u}_t} \mathbf{k}_t + \mathbf{K}_t^T \mathbf{Q}_{\mathbf{u}_t} + \mathbf{K}_t^T \mathbf{Q}_{\mathbf{u}_t, \mathbf{u}_t} \mathbf{k}_t \\ &\hspace{1em} V(\mathbf{x}_t) = \mathrm{const} + \frac{1}{2} \mathbf{x}_t^T \mathbf{V}_t \mathbf{x}_t + \mathbf{x}_t^T \mathbf{v}_t \hspace{2em} \text{(total cost from now until end from state } \mathbf{x}_t \text{)} \\ &\\ &\because \, \mathbf{x}_1 \text{ is given} \\ &\\ &\text{/* 2. Forward recursion */} \\ &\text{for } t = 1 \text{ to } T \text{:} \\ &\hspace{1em} \mathbf{u}_t = \mathbf{K}_t \mathbf{x}_t + \mathbf{k}_t \\ &\hspace{1em} \mathbf{x}_{t+1} = f(\mathbf{x}_t, \mathbf{u}_t) \end{align}\]
- iterative LQR:如果不能线性,就用泰勒展开
- 是的,对轨迹上每个点展开
了解世界
Learn about the world
Version 1.0
- 采集数据 \(\mathcal{D} = \{ (\mathbf{x}, \mathbf{u}, \mathbf{x}')_i \}\)
- 从数据 \(\mathcal{D}\) 学习世界模型 \(f \leftarrow \min_f \sum_i \lVert f(\mathbf{x}_i, \mathbf{u}_i) - \mathbf{x}' \rVert^2\)
Version 1.0 出了什么问题?
想想巴甫洛夫的狗…
- \[\mathcal{D}_0 \, := \{ (\text{ring bell and food}, \cdots\})\]
- \[f_{\mathcal{D}_0} = (\text{bell} = \text{food})\]
- \[\pi_{\mathcal{D}_0} = (\text{if bell, then go to front door for food})\]
被训练集教坏的模型!
- \(\mathcal{D}\) 并不能代表 \(\mathbb{S}\),因为 \(\mathbf{x}_{\mathcal{D}} \subset \mathbb{S}\)
Version 2.0 - DAgger
Data Aggregation
- 初始化 \(\pi_0\)
- 跑 \(\pi_0\) 采集数据 \(\mathcal{D}\)
- 从 \(\mathcal{D}\) 学习 \(f\)
- 更新 \(\pi\) 为 \(\pi_i\)
- 跑 \(\pi_i\) 采集数据 \(\mathcal{D}_i\)
- [DAgger] \(\mathcal{D} := \mathcal{D} \cup \mathcal{D}_i\)
- 回到步骤 3,直至收敛
独当一面
Be the master of yourself
Markov Decision Process
\[\pi(s) := \arg \max_a \{ \sum_{s'} P_a(s, s') ( R_a(s, s') + \gamma V(s') ) \}\] \[V(s) := \sum_{s'} P_{\pi(s)} ( R_{\pi(s)}(s, s') + \gamma V(s') )\]from WikiPedia
评价方法
- 策略表现:\(\eta(\pi) = \mathbb{E} [ \sum_t \gamma^t r_t ]\)
- 状态评分:\(V_\pi(s) = \mathbb{E} [ \sum_t \gamma^t r_t \vert s_0 = s ]\)
- 状态-动作评分:\(Q_\pi(s, a) = \mathbb{E} [ \sum_t \gamma^t r_t \vert s_0 = s, a_0 = a ]\)
\(\gamma\) 为衰减因子
策略梯度
Prolicy Gradient
\[\text{maximize } \mathbb{E} [ R \vert \pi_\theta ]\]
基本思路
- 让好的轨迹更容易发生
- 让好的动作更容易发生
- 改善不好的动作
\[\begin{align} \nabla_\theta \mathbb{E}_x [ f(x) ] &= \nabla_\theta \int dx \, p(x \vert \theta) f(x) \\ &= \int dx \, \nabla_\theta p(x \vert \theta) f(x) \\ &= \int dx \, p(x \vert \theta) \frac{\nabla_\theta p(x \vert \theta)}{p(x \vert \theta)} f(x) \\ &= \int dx \, p(x \vert \theta) \nabla_\theta \log{p(x \vert \theta)} f(x) \\ &= \mathbb{E}_x [ f(x) \nabla_\theta \log{p(x \vert \theta)} ] \,. \end{align}\]
将 \(f(x)\) 替换为我们需要的任务目标
\[\hat{g} := \nabla_\theta \mathbb{E}_\tau [ R(\tau) ] = \mathbb{E}_\tau [ \nabla_\theta \log{p(\tau \vert \theta)} R(\tau) ]\]- \[f \rightarrow R\]
- \[x \rightarrow \tau := (s_0, a_0, r_0, s_1, a_1, r_1, \cdots, s_{T-1}, a_{T-1}, r_{T-1}, s_T)\]
\[\hat{g} := \nabla_\theta \mathbb{E}_\tau [ R(\tau) ] = \mathbb{E}_\tau [ \nabla_\theta \log{p(\tau \vert \theta)} R(\tau) ]\]
现在研究 \(p(\tau \vert \theta)\)
- 在当前策略 \(\pi_\theta\) 下,当前关注的轨迹 \(\tau\) 发生的概率
\[\hat{g} := \nabla_\theta \mathbb{E}_\tau [ R(\tau) ] = \mathbb{E}_\tau [ R(\tau) \sum_t \nabla_\theta \log{\pi_\theta(a_t \vert s_t)} ]\]
现在需要定义 \(R(\tau)\) 了
-
Q函数 / 状态-动作评分
\[Q_{\pi, \gamma}(s, a) = \mathbb{E}_\pi [ r_0 + \gamma r_1 + \gamma^2 r_2 + \cdots \vert s_0 = s, a_0 = a ]\] -
状态评分
\[V_{\pi, \gamma}(s) = \mathbb{E}_{a \sim \pi} [ Q_{\pi, \gamma}(s, a) ]\] -
进步评分
-
在状态 \(s\) 时采取动作 \(a=\pi(s)\) 所能产生的评分提升
\[A_{\pi, \gamma}(s, a) = Q_{\pi, \gamma}(s, a) - V_{\pi, \gamma}(s)\]
-
取其中一种形式
- Q函数
- reward-to-go
- 平均基准评分
得到
\[\hat{g} = \nabla_\theta \mathbb{E}_\tau[R] \approx \mathbb{E}_\tau \bigg[ \sum_{t=0}^{T-1} \nabla_\theta \log{\pi_\theta(a_t \vert s_t)} \bigg( \sum_{t' = t}^{T-1} \gamma^{t' - t} r_{t'} - b(s_t) \bigg) \bigg]\]其中
- \[b(s_t) \approx \mathbb{E} [ r_t + \gamma r_{t+1} + \gamma^2 r_{t+2} + \cdots + \gamma^{T-1-t} r_{T-1} ]\]
构建算法流程
- 初始化策略网络参数 \(\theta\),评价基准 \(b\)
- (训练循环)
- 在环境 \(p\) 中跑当前策略 \(\pi\) 得到轨迹数据 \(\tau\)
- 离散:\(a_t \sim \mathrm{M}\big( \pi_\theta(s_t), \mathbf{p}_a \big)\)
- 连续:\(a_t \sim \mathrm{N}\big( \pi_\theta(s_t), \sigma \big)\)
- 对轨迹 \(\tau\) 中每一步 \(t\) 计算
- 环境评分 \(R_t = \sum_{t'=t}^{T-1} \gamma^{t'-t} r_{t'}\)
- 策略进步评价 \(\hat{A}_t = R_t - b(s_t)\)
- 更新评价基准 \(b \leftarrow \arg \min_b \sum_{t \in \tau} \lVert R_t - b(s_t) \rVert^2\)
- 即将进步评价(的期望)归零
- 使用计算的策略梯度 \(\hat{g}\) 更新策略网络参数 \(\theta\)
- 离散(交叉熵):\(\mathrm{loss}_t := \mathrm{xent}\big( a_t , \pi_{\theta}(s_t) \big) \cdot \hat{A}_t\)
- 连续(KL 散度):\(\mathrm{loss}_t := - \log{\pi_\theta(a_t \vert s_t)} \cdot \hat{A}_t\)
- 在环境 \(p\) 中跑当前策略 \(\pi\) 得到轨迹数据 \(\tau\)